
อุปกรณ์ดิจิทัล || อุปกรณ์อนาล็อก || มอเตอร์ || โล่ || ปิง
มอเตอร์
มาตรา 5.3

เซอร์โวมอเตอร์
เซอร์โวมอเตอร์เป็นอุปกรณ์อัจฉริยะที่มีวงจรรวม บนกระดาน. พวกเขาใช้พิน PWM และความยาวของ ชีพจรที่จะตั้งค่า ตำแหน่งมอเตอร์; มันถือไว้ที่นั่นจนกว่าคุณจะบอกเป็นอย่างอื่น
การส่งพัลส์ที่ถูกต้องไปยังมอเตอร์นั้นค่อนข้างซับซ้อน ดังนั้นเราจึงใช้ 'ไลบรารี' เพื่อทำสิ่งนี้ให้เรา
เซอร์โวเหล่านี้สามารถตั้งค่าได้ทุกที่ระหว่าง 0 - 180 องศา และไม่สามารถหมุนได้เหมือนมอเตอร์ทั่วไป คุณต้องจับคู่ค่าที่ส่งเพื่อไม่ให้อยู่นอกช่วง 0-180 นี้
พวกเขามีเกียร์ภายในที่ชะลอความเร็วและให้แรงบิดที่สูงขึ้น (แรงเลี้ยว)

เซอร์โว รหัสตัวอย่างมอเตอร์


สเต็ปเปอร์มอเตอร์
สเต็ปเปอร์มอเตอร์มีคอยล์ภายในหลายตัวซึ่งสามารถเปิดใช้งานตามลำดับเพื่อหมุนมอเตอร์ด้วยความแม่นยำที่เหลือเชื่อ
ด้านซ้ายมีความละเอียดขั้นที่ 7.5 ซึ่งหมายความว่าขั้นตอนเดียวจะหมุนมอเตอร์ 7.5 องศา ดังนั้นจึงมี 48 ขั้นตอนต่อการหมุน 360 องศา
ต่างจากเซอร์โวที่มอเตอร์เหล่านี้มีความสามารถในการหมุนได้ 360 องศาขึ้นไป เราสามารถนับจำนวนก้าวที่เราทำได้ และ รู้ตำแหน่งเชิงมุมที่แน่นอนของเพลา
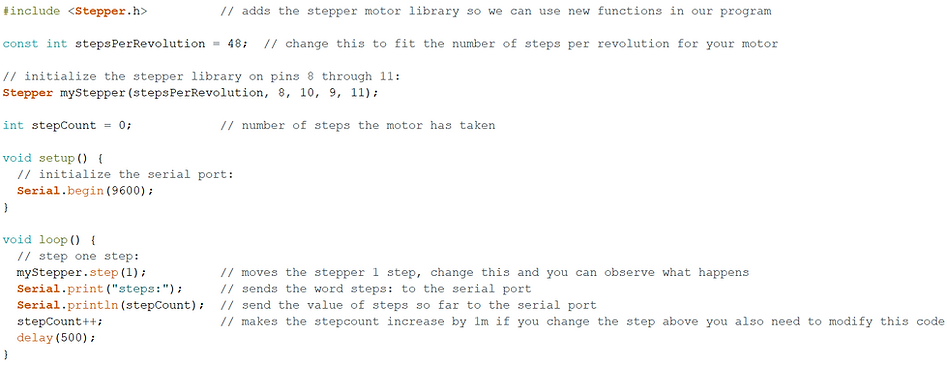
อ่านโค้ดแสดงความคิดเห็นด้านล่างและดูว่ามีการใช้งานอย่างไร
คุณสามารถเห็นการตั้งค่า setpsPerRevolution สำหรับมอเตอร์เฉพาะเหล่านี้ หากคุณใช้รุ่นอื่น คุณจะต้องดูแผ่นข้อมูลและแก้ไขรหัส

รหัสตัวอย่างสเต็ปเปอร์มอเตอร์


มอเตอร์กระแสตรงและตัวควบคุมมอเตอร์
อย่างที่คุณอาจจะ; พร้อมรู้เมื่อ มอเตอร์กระแสตรงเชื่อมต่อกับแบตเตอรี่ทำให้หมุนได้ คุณอาจรู้ว่าคุณสามารถทำให้มอเตอร์หมุนไปในทิศทางอื่นได้ โดยสลับสายบวกและสายลบรอบๆ
ตัวควบคุมมอเตอร์กระแสตรงจะทำการเปลี่ยนสายไฟทั้งหมดให้กับคุณและอื่นๆ อีกมากมาย
มันควบคุมทิศทางการไหลของกระแสผ่านขดลวดและดังนั้น ทิศทางการหมุน
รองรับ PWM เพื่อให้คุณสามารถระบุกำลังและดังนั้น ความเร็วของมอเตอร์



ตารางลอจิกด้านบนแสดงค่า HIGH และ LOW ของพินที่เกี่ยวข้องกับ ผลที่ต้องการ ตัวขับมอเตอร์ L298N นี้มี 2 ช่องสัญญาณ จึงสามารถใช้ควบคุมสองช่องได้ มอเตอร์ในเวลาเดียวกัน
ที่นี่คุณ จะได้เรียนรู้วิธีควบคุมมอเตอร์หนึ่งตัว แต่กระบวนการเดียวกันสำหรับสองมอเตอร์นั้นเป็นกระบวนการเดียวกันกับสายพิเศษและโค้ดที่ซ้ำกัน
คุณสามารถเชื่อมต่อใด ๆ 2 พินดิจิตอลบน Arduino ถึง 'L1' และ 'L2' (I & J บนไดอะแกรม)
คุณยังสามารถเชื่อมต่อ PWM ที่รองรับพินดิจิตอลเข้ากับ 'Enable' (H บนไดอะแกรม) หากคุณต้องการควบคุมความเร็วด้วย หากไม่ต้องการการควบคุมความเร็ว ให้ปล่อยจัมเปอร์พินขนาดเล็กไว้ที่นั่น
รหัสตัวอย่างตัวควบคุมมอเตอร์


พลังงานภายนอกสำหรับมอเตอร์
เมื่อคุณใช้มอเตอร์สำหรับแอพพลิเคชั่นที่ใช้พลังงานต่ำ คุณสามารถใช้ Arduino เพื่อจ่ายไฟได้
หากคุณต้องการใช้มอเตอร์ที่ใหญ่กว่า หรือหลายมอเตอร์ หรือสังเกตว่า Arduino กำลังทำงานอยู่ อย่างน่าประหลาด (ไฟดับ มอเตอร์ ทำงานกะทันหัน) คุณอาจต้องใช้แหล่งพลังงานภายนอก
แยก แบตเตอรี่ จำเป็น เพราะมิฉะนั้นกระแสจะไหลผ่านมากเกินไป ไมโครโปรเซสเซอร์ของ Arduino
COMMON GROUND หมายความว่าคุณต้องเชื่อมต่อค่าลบของแหล่งพลังงานกับกราวด์ของ Arduino (นั่นคือลวดสีดำเส้นเดียวบนกระดาน)